

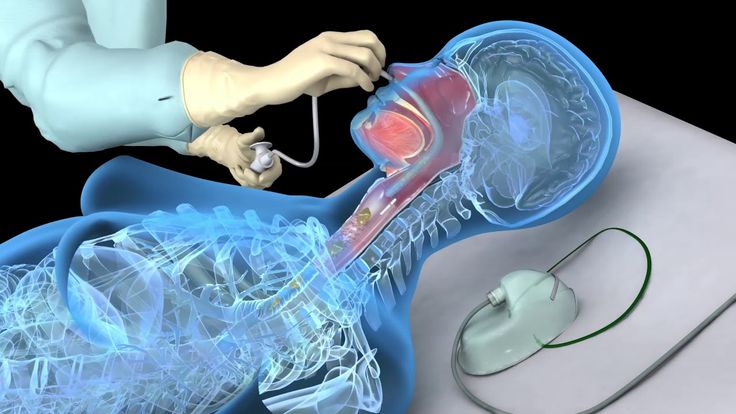
在手術(shù)室里,外科醫(yī)生的手穩(wěn)健地移動(dòng)著,每一步操作都精準(zhǔn)無(wú)誤——但這不是真實(shí)的手術(shù),而是三維動(dòng)畫(huà)構(gòu)建的虛擬培訓(xùn)場(chǎng)景。隨著醫(yī)療技術(shù)飛速發(fā)展,手術(shù)培訓(xùn)三維動(dòng)畫(huà)已成為外科教育不可或缺的工具,它讓醫(yī)學(xué)生在不接觸真實(shí)患者的情況下,反復(fù)練習(xí)高難度手術(shù)操作,顯著降低了醫(yī)療培訓(xùn)的風(fēng)險(xiǎn)和成本。
一、手術(shù)培訓(xùn)三維動(dòng)畫(huà):重塑外科教育的新標(biāo)準(zhǔn)
1. 風(fēng)險(xiǎn)轉(zhuǎn)移與技能提升
傳統(tǒng)外科培訓(xùn)遵循“看一次、做一次、教一次”的模式,首次操作往往直接在患者身上進(jìn)行。而三維動(dòng)畫(huà)構(gòu)建的虛擬手術(shù)環(huán)境,讓醫(yī)生能在零風(fēng)險(xiǎn)的數(shù)字場(chǎng)景中反復(fù)訓(xùn)練復(fù)雜操作。醫(yī)生可在數(shù)字孿生人體上練習(xí)腹腔鏡手術(shù),甚至模擬出血、膽汁滲漏等突發(fā)狀況。研究證實(shí),此類(lèi)培訓(xùn)使學(xué)員技能掌握速度提高。
2. 打破時(shí)空限制的標(biāo)準(zhǔn)化教學(xué)
三維動(dòng)畫(huà)技術(shù)將頂尖專(zhuān)家的手術(shù)技法轉(zhuǎn)化為標(biāo)準(zhǔn)化數(shù)字課程。通過(guò)動(dòng)作捕捉技術(shù)(如OptiTrack紅外攝像機(jī))錄制專(zhuān)家手術(shù)過(guò)程,再驅(qū)動(dòng)虛擬角色模型,學(xué)員能以第一視角觀(guān)察每個(gè)細(xì)節(jié)。
二、手術(shù)培訓(xùn)三維動(dòng)畫(huà)制作全流程解析
1. 前期準(zhǔn)備:醫(yī)學(xué)準(zhǔn)確性的基石
需求精準(zhǔn)定位
與外科專(zhuān)家共同確定動(dòng)畫(huà)目標(biāo)(如膝關(guān)節(jié)置換流程),明確受眾(住院醫(yī)師/醫(yī)學(xué)生)、手術(shù)關(guān)鍵步驟及易錯(cuò)點(diǎn)。
醫(yī)學(xué)素材深度整合
收集CT/MRI影像、手術(shù)實(shí)錄視頻、器械說(shuō)明書(shū)等,確保解剖結(jié)構(gòu)比例、器械操作角度等完全符合醫(yī)學(xué)規(guī)范。例如靜脈必須為藍(lán)色、動(dòng)脈為紅色,神經(jīng)為黃色的國(guó)際通用色彩編碼。
2. 三維建模:從數(shù)據(jù)到動(dòng)態(tài)模型
高精度解剖建模
使用Maya或Blender構(gòu)建器官模型時(shí),需避免幾何簡(jiǎn)化(如肝臟不能簡(jiǎn)化為球形,小腸不可為圓柱體)。
物理引擎集成
為模擬組織彈性、血液流動(dòng)等效果,需在Unity中整合物理引擎(如VirtaMed的器官物理仿真系統(tǒng)),計(jì)算器械與組織的實(shí)時(shí)力反饋。
3. 動(dòng)畫(huà)制作:讓醫(yī)學(xué)知識(shí)“動(dòng)”起來(lái)
關(guān)鍵幀醫(yī)學(xué)邏輯設(shè)計(jì)
根據(jù)手術(shù)流程設(shè)置關(guān)鍵幀:切口位置→組織分離→假體植入→縫合。動(dòng)作路徑需還原真實(shí)手術(shù)節(jié)奏(如電刀移動(dòng)速度、縫合力度)。
鏡頭語(yǔ)言醫(yī)學(xué)化
景別以近景與特寫(xiě)為主(展示手部操作細(xì)節(jié)),鏡頭運(yùn)動(dòng)需平緩穩(wěn)定,避免快速切換導(dǎo)致眩暈。突發(fā)狀況(如大出血)可用鏡頭驟停強(qiáng)化警示。
4. 后期與交付:從視覺(jué)到多感官體驗(yàn)
特效與交互增強(qiáng)
在A(yíng)fter Effects中添加粒子特效(出血噴霧、電刀火花),結(jié)合空間化音效(監(jiān)護(hù)儀警報(bào)、骨鋸聲)提升沉浸感。
多平臺(tái)適配輸出
VR頭盔版本需保留6DoF(六自由度)交互;移動(dòng)端版本則壓縮渲染分辨率,確保低延遲操作體驗(yàn)。
三、避坑指南:手術(shù)培訓(xùn)動(dòng)畫(huà)的5大誤區(qū)
1. 視覺(jué)效果凌駕醫(yī)學(xué)準(zhǔn)確性
為追求畫(huà)面炫酷而簡(jiǎn)化解剖結(jié)構(gòu)(如將神經(jīng)血管束建模為單一線(xiàn)條),導(dǎo)致學(xué)員形成錯(cuò)誤認(rèn)知。解決方案:建模階段由2名以上外科醫(yī)生審核模型拓?fù)浣Y(jié)構(gòu)。
2. 運(yùn)動(dòng)規(guī)律違反醫(yī)學(xué)原理
功能性動(dòng)畫(huà)(如關(guān)節(jié)運(yùn)動(dòng))未遵循生物力學(xué)原理。正解:骨骼旋轉(zhuǎn)需以解剖學(xué)軸線(xiàn)為基準(zhǔn),肌肉變形需符合肌纖維走向。
3. 交互設(shè)計(jì)脫離臨床場(chǎng)景
VR培訓(xùn)中未設(shè)置器械意外掉落、視野遮擋等真實(shí)狀況。改進(jìn)方案:在Unity中預(yù)設(shè)20+種突發(fā)狀況腳本,提升應(yīng)變能力訓(xùn)練。
4. 知識(shí)密度過(guò)高
單集動(dòng)畫(huà)演示全髖關(guān)節(jié)置換(120分鐘手術(shù)),導(dǎo)致信息過(guò)載。優(yōu)化策略:按手術(shù)階段分集(切口暴露→假體安裝→關(guān)閉),每段≤8分鐘。
5. 忽視跨文化醫(yī)療差異
全球版培訓(xùn)未考慮術(shù)式差異(如歐美常用前路髖關(guān)節(jié)手術(shù),亞洲偏好后路)。對(duì)策:開(kāi)發(fā)模塊化動(dòng)畫(huà)庫(kù),支持路徑自定義配置。
四、手術(shù)培訓(xùn)三維動(dòng)畫(huà)定制經(jīng)驗(yàn)建議
1. 構(gòu)建“醫(yī)學(xué)+技術(shù)”雙核團(tuán)隊(duì)
聘請(qǐng)副主任醫(yī)師級(jí)別以上顧問(wèn),負(fù)責(zé)腳本醫(yī)學(xué)審核
建模師需完成基礎(chǔ)解剖學(xué)培訓(xùn)(建議≥80課時(shí))
定期組織手術(shù)室觀(guān)摩,理解器械操作手感
2. 建立科學(xué)的測(cè)試修正機(jī)制
分階段可用性測(cè)試:
Alpha版:由醫(yī)學(xué)生操作并反饋理解障礙
Beta版:三甲醫(yī)院主治醫(yī)師評(píng)估操作邏輯
Release版:跟蹤50例培訓(xùn)考核通過(guò)率
3. 前沿技術(shù)融合實(shí)踐
集成觸覺(jué)反饋手套(如SenseGlove):模擬組織阻力感
采用眼動(dòng)追蹤技術(shù):優(yōu)化鏡頭焦點(diǎn)(如聚焦術(shù)野出血點(diǎn))
開(kāi)發(fā)AI評(píng)分系統(tǒng):自動(dòng)檢測(cè)操作錯(cuò)誤(如鉗夾位置偏差>3mm)
當(dāng)虛擬與現(xiàn)實(shí)在手術(shù)臺(tái)上交融,三維動(dòng)畫(huà)已不再是簡(jiǎn)單的視覺(jué)輔助工具。它正在重塑外科醫(yī)生的培養(yǎng)范式——從被動(dòng)觀(guān)察到主動(dòng)操作,從抽象理解到肌肉記憶訓(xùn)練。手術(shù)培訓(xùn)三維動(dòng)畫(huà)定制的核心價(jià)值,在于用數(shù)字技術(shù)搭建起一座連接醫(yī)學(xué)知識(shí)與臨床實(shí)踐的橋梁。
隨著物理引擎精度的提升和觸覺(jué)反饋技術(shù)的發(fā)展,未來(lái)的手術(shù)三維動(dòng)畫(huà)將無(wú)限逼近真實(shí)組織質(zhì)感。而每一次技術(shù)迭代,都在為同一個(gè)目標(biāo)服務(wù):讓外科醫(yī)生在真正站上手術(shù)臺(tái)時(shí),雙手早已通過(guò)虛擬訓(xùn)練積累了千百次經(jīng)驗(yàn)。這不僅是技術(shù)的勝利,更是對(duì)醫(yī)學(xué)教育本質(zhì)的回歸——在零風(fēng)險(xiǎn)中追求完美,在重復(fù)訓(xùn)練中成就生命守護(hù)者。
鄭州華匠科技有限公司成立于2016年,是一家專(zhuān)注于3D數(shù)字內(nèi)容制作的服務(wù)商,我們致力于為客戶(hù)提供三維模型、三維場(chǎng)景、動(dòng)畫(huà)及人物等相關(guān)內(nèi)容的定制服務(wù),公司深耕虛擬仿真行業(yè)多年,積累了豐富的經(jīng)驗(yàn)和資源,是您3D數(shù)字內(nèi)容定制的優(yōu)質(zhì)合作伙伴。

視頻號(hào)二維碼

抖音掃一掃





